


據(jù)了解,電渦流傳感器能靜態(tài)和動態(tài)地非接觸姻政、高線性度呆抑、高分辨力地測量被測金屬導(dǎo)體距探頭表面的距離。它是一種非接觸的線性化計量工具扶歪。電渦流傳感器能準(zhǔn)確測量被測體(必須是金屬導(dǎo)體)與探頭端面之間靜態(tài)和動態(tài)的相對位移變化理肺。
下面本文介紹電渦流傳感器安裝方法,有興趣的小伙伴和本小編一起倆看看吧善镰!

電渦流傳感器安裝方法
1 探頭的安裝
①探頭插入安裝孔之前妹萨,應(yīng)保證孔內(nèi)無雜物,探頭能自由轉(zhuǎn)動而不會與導(dǎo)線纏繞炫欺。
②為避免擦傷探頭端部或監(jiān)視表面乎完,可用非金屬測隙規(guī)測定探頭的間隙。
③也可用連接探頭導(dǎo)線到延伸電纜及前置器的電汽方法整定探頭間隙品洛。
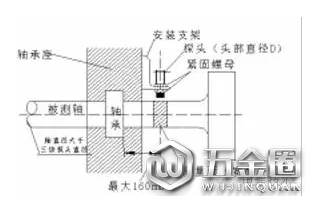
當(dāng)探頭間隙調(diào)整合適后树姨,旋緊防松螺母摩桶。此時應(yīng)注意,過分旋緊會使螺紋損壞帽揪。探頭被固定后硝清,探頭的導(dǎo)線也應(yīng)牢固。延伸電纜的長度應(yīng)于前置器所需的長度一致转晰。任意的加長或縮短均會導(dǎo)致測量誤差芦拿。具體安裝如圖1所示。
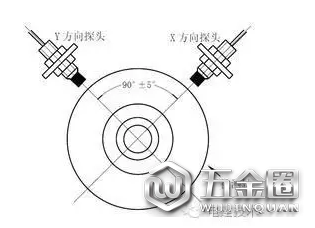
當(dāng)每個測點需要同時安裝兩個傳感器探頭查邢,兩個探頭應(yīng)分別安裝在軸承兩邊的同一平面上相隔90°±5°蔗崎。由于軸承蓋一般是水平分割的,因此通常將兩個探頭分別安裝在垂直中心線每一側(cè)45°扰藕,從原動機端看缓苛,分別定義為X探頭(水平方向)和Y探頭(垂直方向),X方向在垂直中心線的右側(cè)邓深,Y方向在垂直中心線的左側(cè)未桥。如圖2所示。
2 延伸電纜的安裝
延伸電纜作為連接探頭和前置器的中間部分庐完,是渦流傳感器的一個重要組成部分钢属,所以延伸電纜的安裝應(yīng)保證在使用過程中不易受損壞,應(yīng)避免延伸電纜的高溫環(huán)境门躯。探頭與延伸電纜的連接處應(yīng)鎖緊淆党,接頭用熱縮管包裹好,這樣可以避免接地并防止接頭松動讶凉。在盤放延伸電纜時應(yīng)避免盤放半徑過小而折壞電纜線染乌。一般要求延伸電纜盤放直徑不得小于55mm.
3 前置器的安裝
前置器應(yīng)置于鑄鋁的盒子內(nèi),以免機械損壞及污染懂讯。不允許盒子上附有多余的電纜荷憋,在不改變探頭到前置器電纜長度的前提下,允許在同一個盒內(nèi)裝有多個前置器褐望,以降低安裝成本勒庄,簡化從前置器到監(jiān)視器的電纜布線。采用適當(dāng)?shù)母綦x和屏蔽接地瘫里,將信號所受的干擾降至最低限度实蔽。前置器是整個傳感器系統(tǒng)的信號處理部分,要求將其安裝在遠離高溫環(huán)境的地方谨读,其周圍環(huán)境應(yīng)無明顯的蒸汽和水珠局装、無腐蝕性的汽體、干燥、振動小铐尚、前置器周圍的環(huán)境溫度與室溫相差不大的地方拨脉。安裝時前置器殼體金屬部分不要同機殼或大地接觸。安裝時必須避免有其他干擾信號影響測量電路宣增。
4 軸振動傳感器安裝間隙的鎖定
將探頭玫膀、延伸電纜、前置器連接起來统舀,并給傳感器系統(tǒng)接上電源匆骗,用精度較高的萬用表監(jiān)測前置器的輸出電壓,同時調(diào)整探頭與被測面的間隙誉简,當(dāng)前置器的輸出電壓大約在10-11vDC之間時,擰緊探頭的兩個緊固螺母固定探頭即可盟广。
5 注意事項
①不規(guī)則的被測體表面闷串,會給實際測量帶來附加誤差,因此被測體表面應(yīng)該平整光滑筋量,不應(yīng)存在凸起烹吵、洞眼、刻痕桨武、凹槽等缺陷肋拔。
②當(dāng)被測體為圓軸且探頭中心線與軸心線正交時,一般要求被測軸直徑為探頭頭部直徑的3倍以上呀酸。
③被測體表面不應(yīng)有傷痕凉蜂、小孔和縫隙,不允許表面電鍍性誉。被測體材料應(yīng)與探頭窿吩、前置器標(biāo)定的材料一致。
①探頭通過支架固定在軸承座上错览,支架應(yīng)有足夠的剛度以提高其自振頻率纫雁,避免或減小被測體振動時支架的受激自振。
②對初始間隙的要求
電渦流傳感器應(yīng)在一定的間隙電壓(傳感器頂部與被測物體之間間隙倾哺,在儀表上指示一般是電壓)值下轧邪,其讀數(shù)才有較好的線性度,所以在安裝傳感器時必須調(diào)整好合適的初始間隙羞海。
轉(zhuǎn)子旋轉(zhuǎn)和機組帶負(fù)荷后忌愚,轉(zhuǎn)子相對于傳感器將發(fā)生位移。如果把傳感器裝在軸承頂部扣猫,其間隙將減少菜循;如裝在軸承水平方向,其間隙取決于轉(zhuǎn)子旋轉(zhuǎn)方向;當(dāng)轉(zhuǎn)向一定時癌幕,其間隙取決于安裝在右側(cè)還是左側(cè)衙耕。為了獲得合適的工作間隙值,在安裝時應(yīng)估算轉(zhuǎn)子從靜態(tài)到轉(zhuǎn)動狀態(tài)機組帶負(fù)荷后軸頸位移值和位移方向勺远,以便在調(diào)整初始間隙時給予考慮橙喘。根據(jù)現(xiàn)場經(jīng)驗,轉(zhuǎn)子從靜態(tài)到工作轉(zhuǎn)速胶逢,軸頸抬高大約為軸瓦間隙的1/2厅瞎;水平方向位移與軸瓦形式、軸瓦兩側(cè)間隙和機組滑銷系統(tǒng)工作狀態(tài)有關(guān)初坠,一般位移值為0.05-0.20mm和簸。
在調(diào)整傳感器初始間隙時,除了要考慮上述這些因素外碟刺,還要考慮最大振動值和轉(zhuǎn)子原始晃擺值锁保。傳感器初始間隙應(yīng)大于轉(zhuǎn)軸可能發(fā)生的最大振幅和轉(zhuǎn)軸原始晃擺值的1/2。
了解更多行業(yè)資訊半沽,敬請關(guān)注五金圈(http://www.zinnal.com)

掃碼加入五金人自己的朋友圈~






